为了使直流力矩电机运行速度的控制精度降低扰动对系统输出的影响,应尽可能地增加系统的开环放大倍数。但是随着系统开环放大倍数的提高,系统的稳定性受到影响,为了提高系统的控制精度和鲁棒性,在前向通路中串联速度调节器(采用二阶超前滞后算法)以改善系统的动态性能并提高系统的控制精度和稳定性。
由波动力矩引起的速度波动量为:

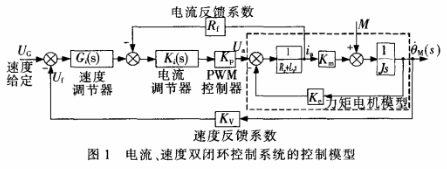
由于系统力矩波动的影响,直流力矩电机的电枢电流会产生波动,在速度环中加入电流环增加系统的阻尼以抑制电枢电流的波动。系统电流环的带宽应为速度环带宽的5-10倍,这样电流内环才能起到快速调节电流的作用,改善速度输出的平稳性。电流、速度闭环控制系统的模型如图1所示。
由引入电流环后波动力矩引起的速度波动量为:

通过状态观测器设计,对系统的极点进行重新配置,也可以实现对系统力矩波动的抑制,将电枢电流和输出的角速度作为状态观测器的状态变量,输入变量为控制电压和力矩波动值,通过合理的参数设计,就可以很好的抑制输出转速的波动。直流力矩电机的数学模型为:
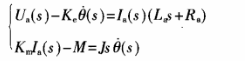
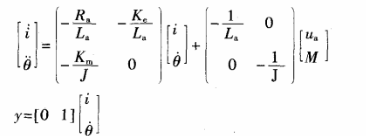
得出直流力矩电机的动态方程:
为了验证上述三种方法对力矩波动的抑制效果,分别建立速度闭环仿真模型,电流、速度双闭环仿真模型和状态观测器仿真模型,得出仿真结果,并且比较各种算法对直流力矩电机波动力矩的抑制效果。
将系统输入信号设定为0.1°/s,力矩波动信号设定为0.01sin(0.89t)的正弦波信号,电机波动力矩引起的速度波动幅值为0.02°/s 。若采用速度闭环控制方法,力矩波动减少至0.0004°/s。若采用电流、速度双闭环控制方法,其仿真结果减少至0.00028°/s。比较三种算法的仿真结果,可以得出电流、速度闭环控制方法对电机的力矩波动抑制效果最为明显,能够提高系统的低速稳定精度,有效抑制直流力矩电机力矩波动。



